SAM was a group project: four people, ten weeks, three progressively harder challenges. I was responsible for all interaction design: the emotional state system, dialogue flow, voice decisions, and the user evaluation.
Three open-ended challenges, each adding a new communication constraint: verbal only, then non-verbal only, then both combined. We chose a robot waiter. A socially loaded role that made every constraint harder and more interesting.
The course ran across three challenges, each adding a new constraint. We chose a restaurant context throughout. A waiter is one of the most socially loaded roles there is, and getting a robot to feel like it is genuinely attending to you, not just completing a delivery, is a real design challenge.
My focus was interaction design: the emotional state system, dialogue flow, voice decisions, documentation, and presentation. The hardware and coding were handled by my teammates.
Verbal — robot receptionist
Speech only, handling unpredictable natural language from a stranger
Non-verbal — silent waiter
LEDs and movement only. No speech, no fallback.
Multi-modal — voice and expression combined
Face tracking, dialogue management, and voice informed by what failed in Challenge 2
A co-creation session early in the process confirmed that eyes and a warm expression were non-negotiable. Every participant said so independently.
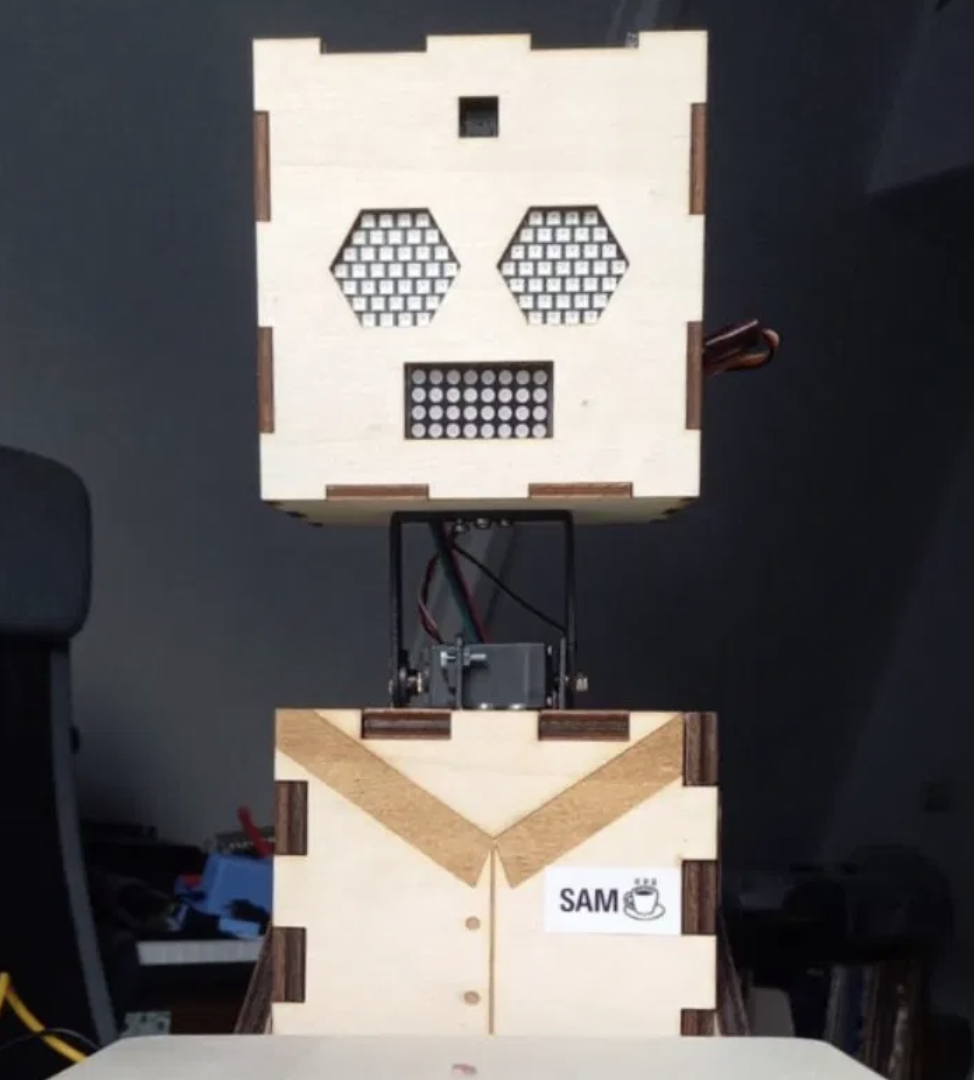
SAM is a laser-cut wooden robot with hexagonal LED eyes, an LED matrix mouth, a serving tray, and a Huskylens face-tracking camera mounted in the head. The wooden body was built by teammates. The interaction layer was mine to design: what SAM sees, says, and expresses.
We prototyped through peerplay before building anything, tested two voice types with real participants, and let the data decide.
Challenge 2 started with peerplay: we acted out the scenarios before building anything. One person played the robot, one the customer. That exercise surfaced the three core branches early and grounded every subsequent decision in something we had actually experienced, not assumed.
For Challenge 3, a co-creation session defined SAM's full modality set. Before committing to a voice, we ran a dedicated comparative voice test comparing robot-like and human-like delivery. The robot-like voice won, since a human-sounding voice raised expectations SAM could not meet. In a service context, sincerity matters more than warmth.

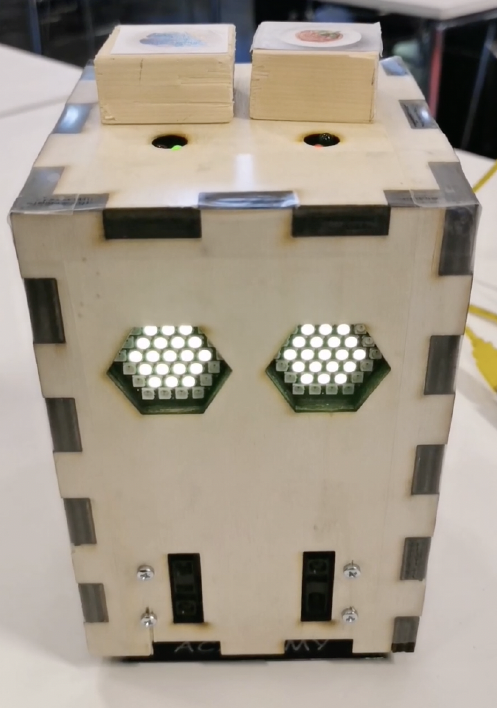
SAM used three states. The default state (blue eyes, slight smile) was SAM's baseline as it approached and waited. Happy and error handling are shown below.
State II
Happy
Triggered when the customer picks up the correct drink. In Challenge 3, this state combines with a verbal response. SAM confirms the order and says goodbye before moving on.
Correct pick-up
State III
Error handling
Triggered by a wrong pick-up or no response. SAM acknowledges the issue verbally and offers a way forward: "Oh sorry, what else did you order?" Proactive rather than defeated.
Wrong order or no response
The concept landed well. Participants engaged with SAM unprompted, and the eyes were the most legible expressive channel by far.
Participants responded warmly. Several described SAM as beautiful or special, and many engaged with it unprompted, waving, smiling, and saying thank you without being asked. The eyes were the most legible expressive channel by far. One participant felt more comfortable with SAM than with a human waiter, citing less social pressure in the exchange.
The full modality set in place, we ran a structured user evaluation across three scenarios: correct pick-up, wrong pick-up, and no response. Two numbers stand out:
6/9
Task completion
Participants completed their scenario correctly, even when uncertain during the interaction.
2.57
Concept liking
On a 7-point scale where 1 is most positive. Highest-scoring dimension in the evaluation.
This is what Challenge 3 looked like in practice:
Challenge 3 demo, the final version of SAM. It combines face tracking, voice, and emotional expression.